|
I am a Ph.D. student (2020-now) at the State Key Lab of CAD&CG, Zhejiang University, advised by Prof. Guofeng Zhang and Prof. Zhaopeng Cui. During my Ph.D., I work closely with Yinda Zhang. I used to visit Computer Vision and Geometry Group at ETH Zürich, advised by Marc Pollefeys. My research interests are in 3D computer vision and AR/VR, specifically neural rendering, structure from motion, and human avatar. I will graduate in 2025 and am looking for a job in academia or industry. |

|
|
|
|
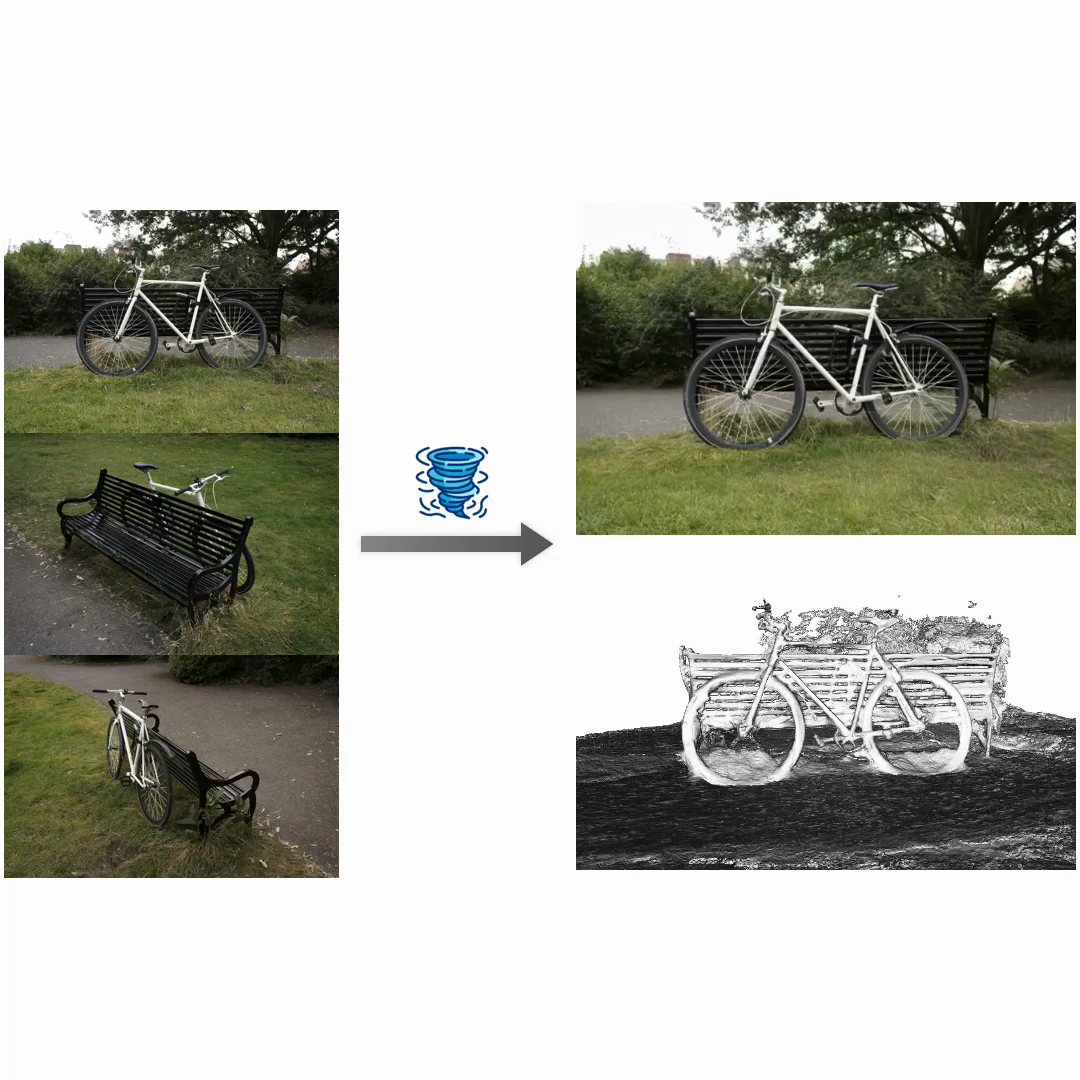
Chong Bao, Xiyu Zhang, Zehao Yu, Jiale Shi, Guofeng Zhang, Songyou Peng, Zhaopeng Cui CVPR, 2025 project page / arXiv / video / code We propose a new GS with video diffusion model for novel view synthesis and surface reconstruction from extremely sparse(3-4), unposed images in unbounded 360 scenes. |

|
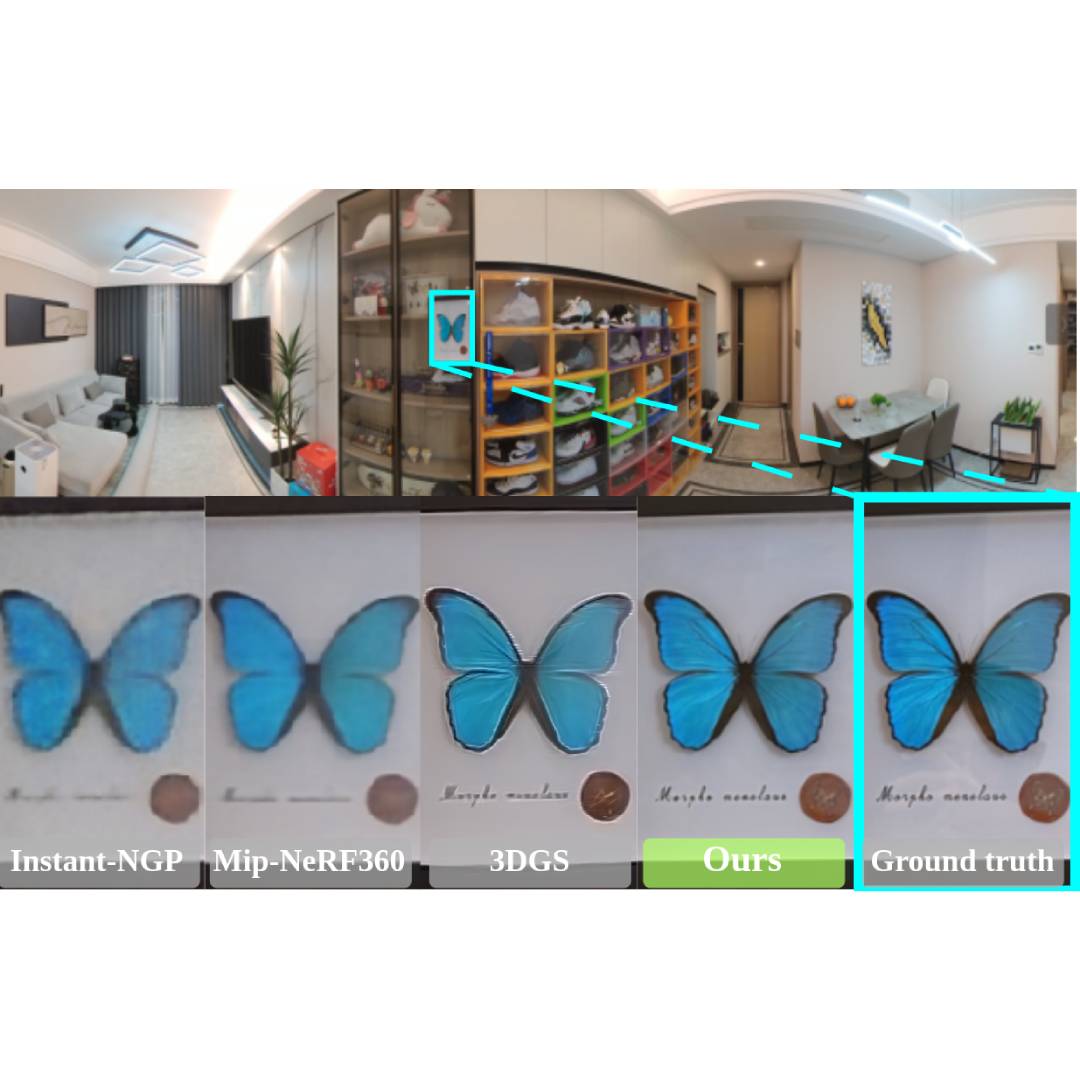
Xiaoyu Zhang, Weihong Pan, Chong Bao, Xiyu Zhang, Xiaojun Xiang, Hanqing Jiang, Hujun Bao, CVPR, 2025 project page / arXiv / code We introduce a novel frequency-aware framework for view synthesis that simultaneously captures the overall scene structure and high-definition details within a single NeRF model. |
|
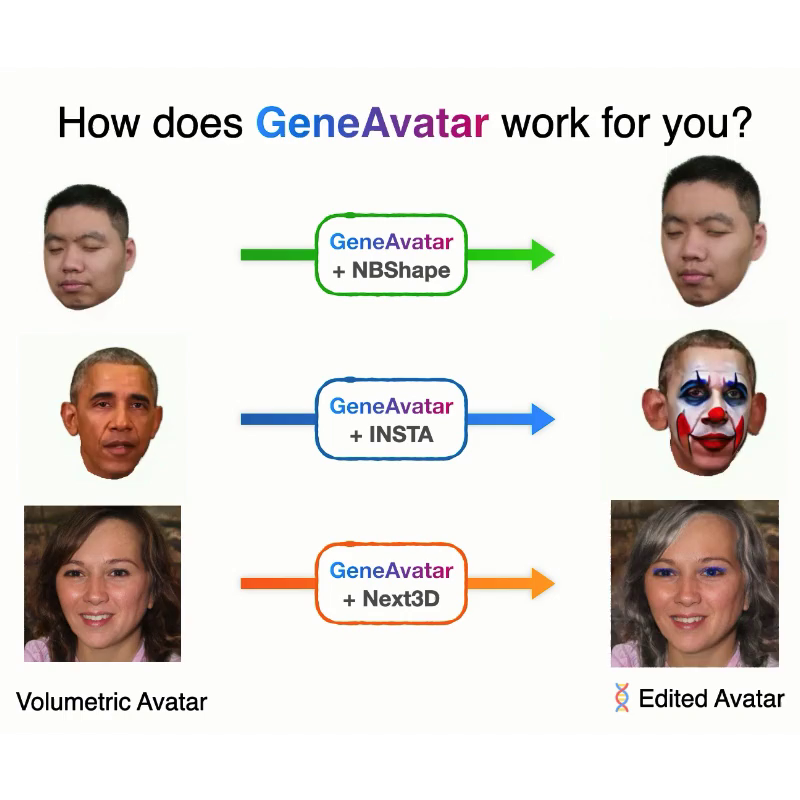
Chong Bao*, Yinda Zhang*, Yuan Li*, Xiyu Zhang, Bangbang Yang, Hujun Bao, Marc Pollefeys, Guofeng Zhang, Zhaopeng Cui CVPR, 2024 project page / arXiv / video / code We present a generic approach to edit 3D avatars in various volumetric representations from a single perspective. |
|
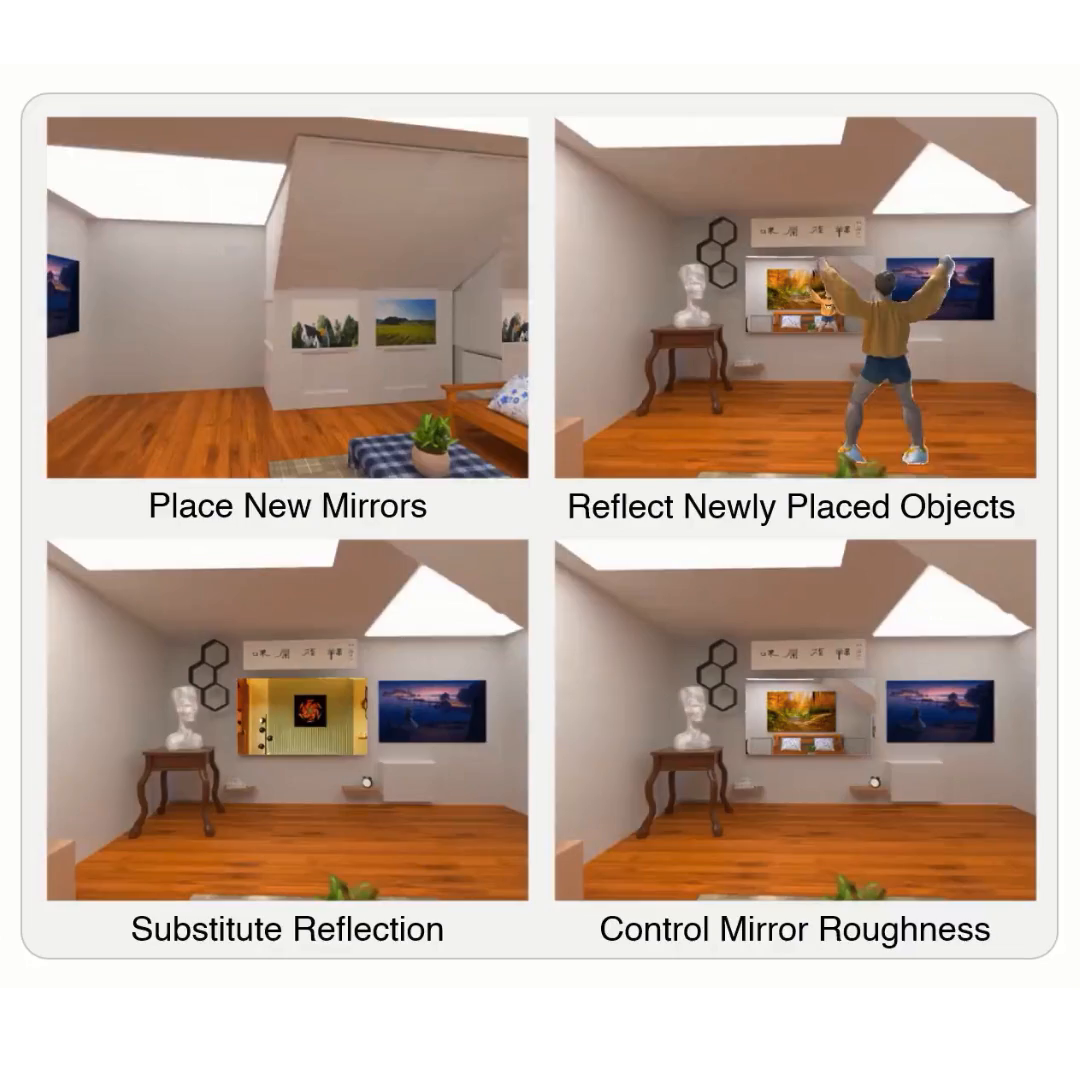
Junyi Zeng*, Chong Bao*, Rui Chen, Zilong Dong, Guofeng Zhang, Hujun Bao, Zhaopeng Cui MM, 2023 project page / arXiv / video / code We present a novel neural rendering framework, which is able to learn accurate geometry and reflection of the mirror and support various scene manipulation applications. |
|
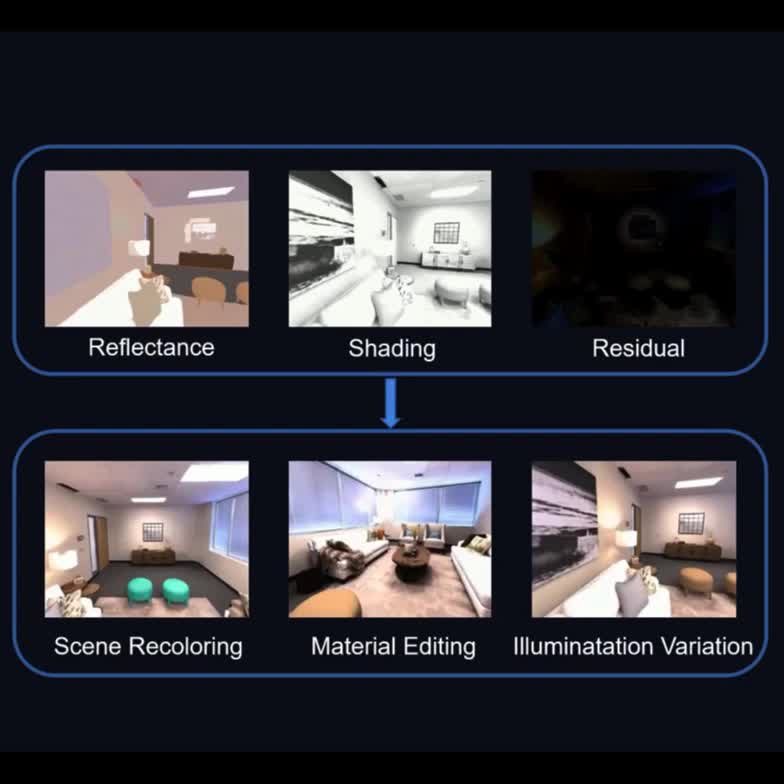
Weicai Ye*, Shuo Chen*, Chong Bao, Hujun Bao, Marc Pollefeys, Zhaopeng Cui, Guofeng Zhang ICCV, 2023 project page / arXiv / code We introduce intrinsic decomposition into the NeRF-based neural rendering method and can perform editable novel view synthesis in room-scale scenes. |
|
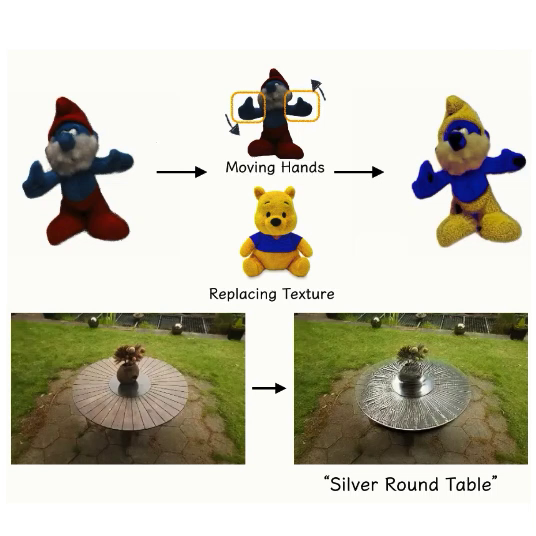
Chong Bao*, Yinda Zhang*, Bangbang Yang*, Tianxing Fan, Zesong Yang, Hujun Bao, Guofeng Zhang, Zhaopeng Cui CVPR, 2023 project page / arXiv / video / code We present a novel semantic-driven NeRF editing approach, which enables users to edit a neural radiance field with a single image. |
|
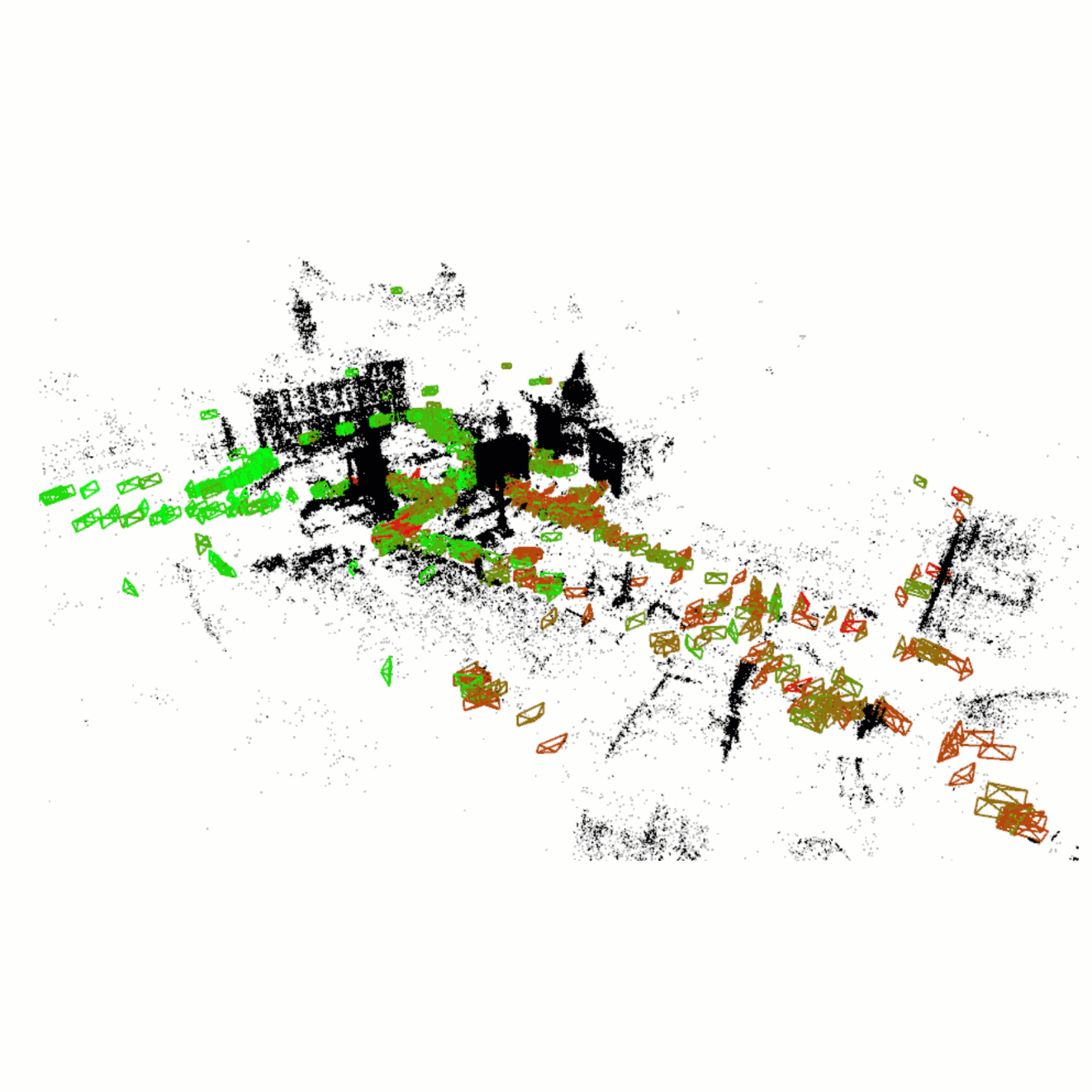
Zhichao Ye, Chong Bao, Xin Zhou, Haomin Liu, Hujun Bao, Guofeng Zhang TCSVT, 2023 paper / arXiv / code We present an efficient covisibility-based incremental SfM and exploit covisibility and registration dependency to describe the image connection |

|
Bangbang Yang*, Chong Bao*, Junyi Zeng, Hujun Bao, Yinda Zhang, Zhaopeng Cui, Guofeng Zhang ECCV, 2022 (Oral Presentation) project page / arXiv / video / code We present a novel mesh-based implicit field with disentangled geometry and texture codes on mesh vertices, which facilitates a set of editing functionalities. |
|
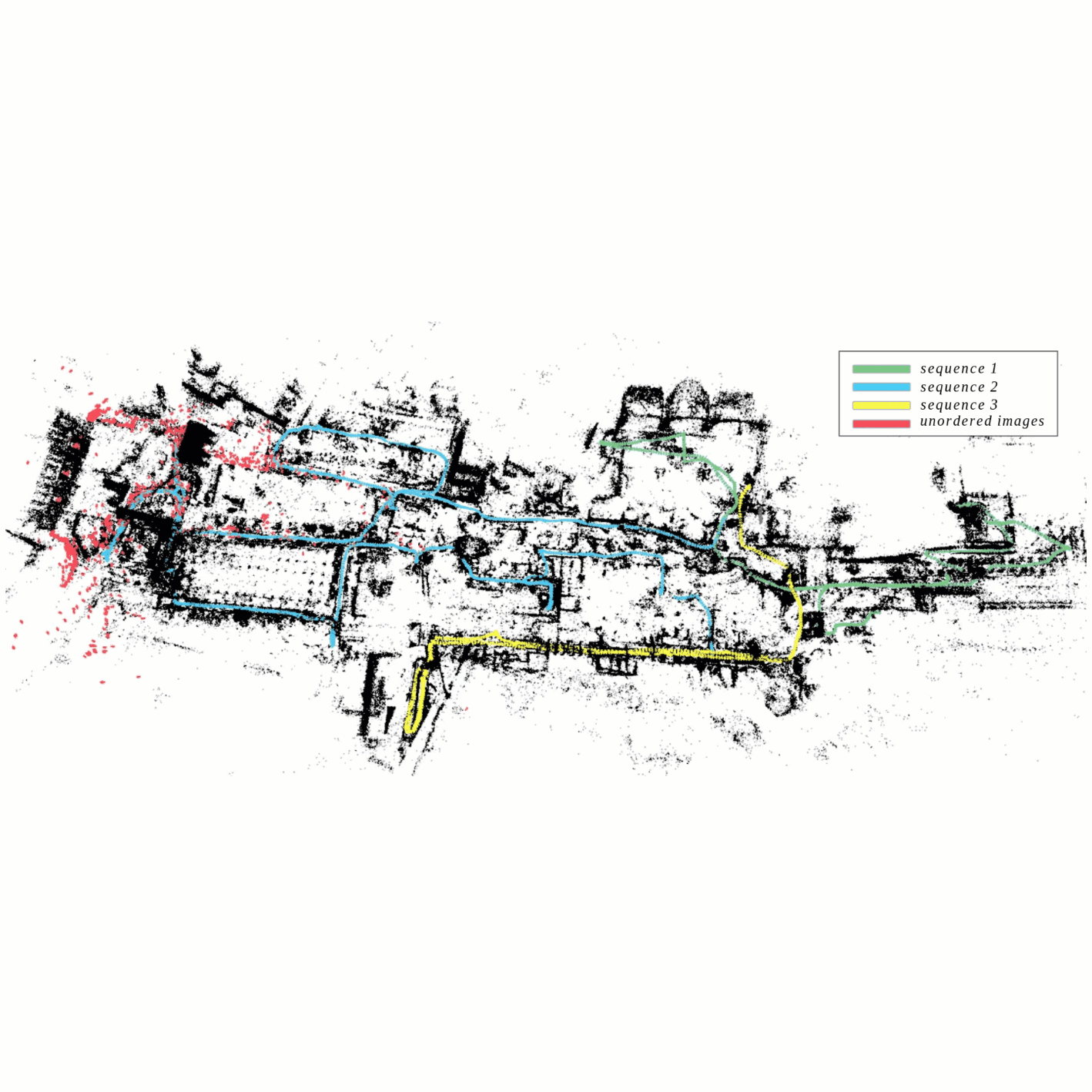
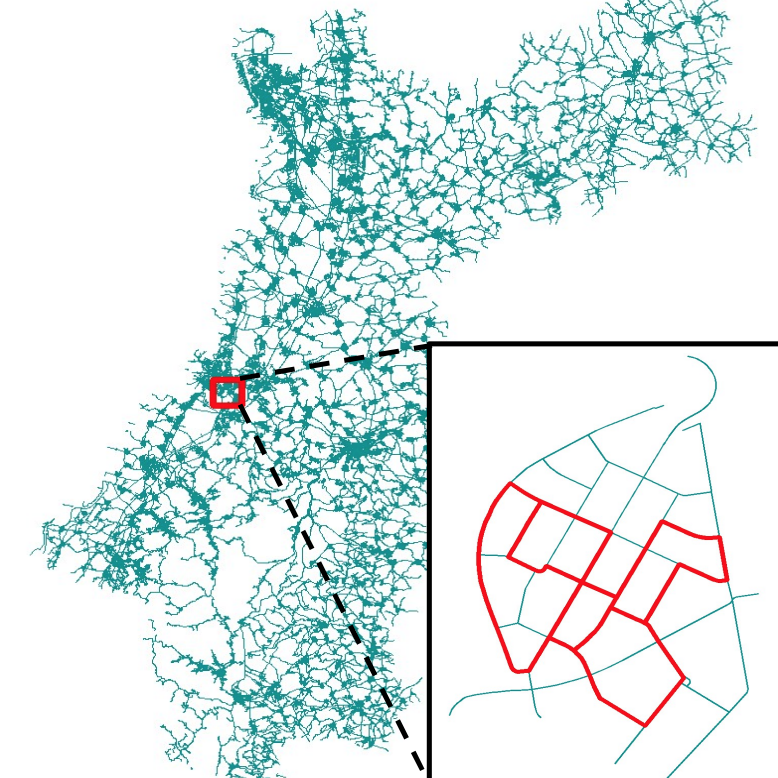
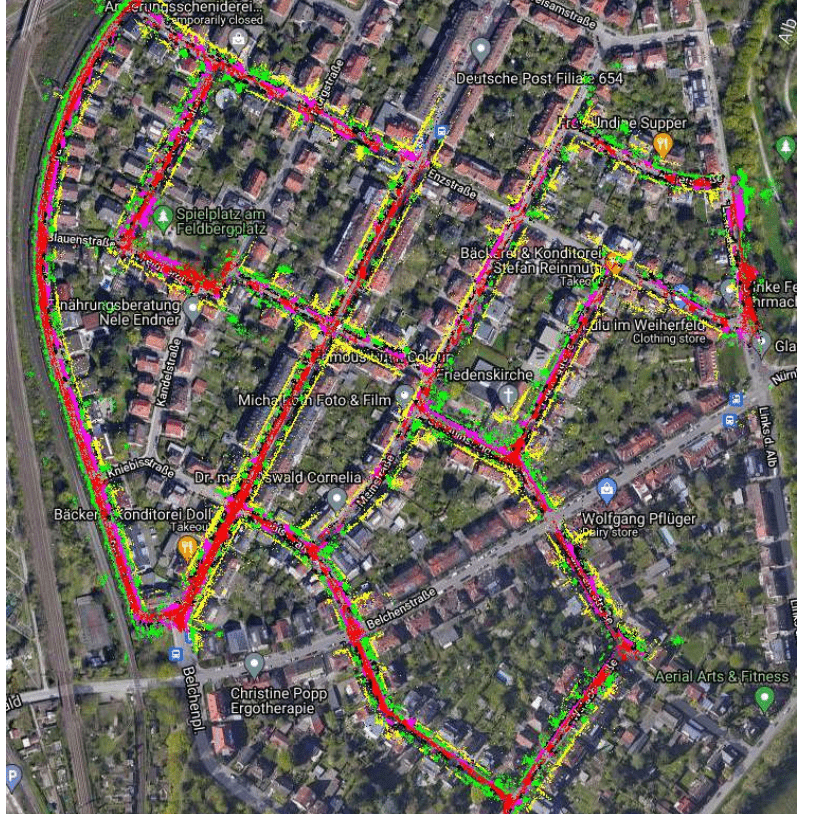
Zhichao Ye, Chong Bao, Xinyang Liu, Hujun Bao, Zhaopeng Cui, Guofeng Zhang ICRA, 2022 paper We present a low-cost mapping solution that is able to refine and align the monocular reconstructed point cloud given a public street map. |


|
Tianxiang Zhang*, Chong Bao*, Hongjia Zhai*, Jiazhen Xia, Weicai Ye, Guofeng Zhang CyberSciTech, 2021 paper / video We present a multi-device integrated cargo loading management system with AR, which monitors cargoes by fusing perceptual information from multiple devices in real-time. |
|
|
 |
Student Researcher
Google AR 2025.03-now |
 |
Visiting Student
Computer Vision and Geometry Lab, ETH Zürich supervised by Marc Pollefeys 2023.09-2024.09 |
 |
Research Intern
Multi-sensor Fusion Localization Group, Sensetime 2020.07-2020.09 |
|
|
Research Intern(Star of Tomorrow)
Internet Graphics Group, Microsoft Research Asia(MSRA) 2020.04-2020.07 |
|
|

|
Ziyang Zhang, Chong Bao, Hai Li, First prize in China Mobile Application Innovation Competition, held by Apple. , 2021 appstore We develop a platform realizing augmented urban reality based on scene localization. |
|
Design and source code from Jon Barron's website |